After thirty-some filthy, intimate hours, there are twenty-five, flex-rated electrical conductors and a pneumatic hose running through Abe's center.
These cables will allow us to connect power, data, pressure, and vacuum to the end effector of the robot, while never having to worry about them becoming tangled during complex movements.
When robots leave the factory with these things pre-wired, the cables are placed while each massive axis is connected to the next. We dreamt about these scenarios, working at 4am, when our shoulders ached from contorting to reach cables our fingers could barely touch, and our hands bled from untrimmed flashing while struggling with deeply hidden bolts.
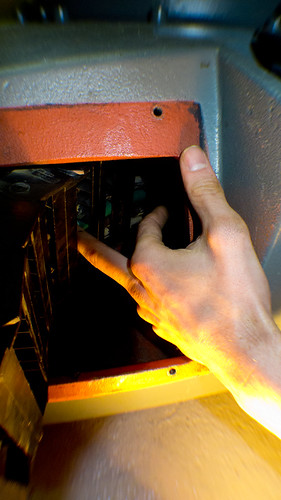
Above, you can barely see our green multi-conductor cable progressing through the some of the last steps of Abe's labyrinth. In a productive use of the middle finger, I'm helping our cable take the radius of the its carrier. Eventually, we succeeded in routing the cables through, and the (trying) labor seemed worth the several thousand dollars we would have spent having this done by the manufacturer.

Princeton Custom Robots

Forget hot rods and choppers: custom robots are where it's at. Abe recently got a good cleaning and a new coat of paint, and is starting to look rather sharp.
Next up is routing some cable and air hose...
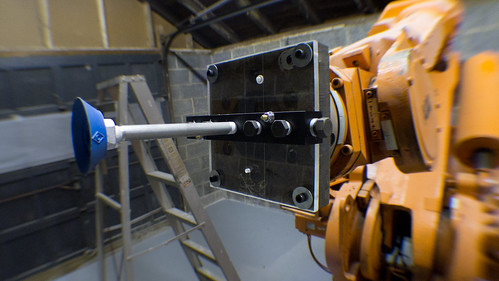
Drawing a Vacuum
This is our first end-effector for Abe, a vacuum gripper constructed primarily of parts from McMaster-Carr. Beautifully comical in appearance, it works amazingly well and can hold ceramic tiles with just a few inches of mercury.
Finally, we have what we need to start building.
Finally, we have what we need to start building.
Subscribe to:
Posts (Atom)